
El robot cargador remoto autónomo de ABB muestra potencial en su demostración SIMS en Boliden Garpenberg
El robot cargador remoto autónomo de ABB muestra potencial en su demostración SIMS en Boliden Garpenberg
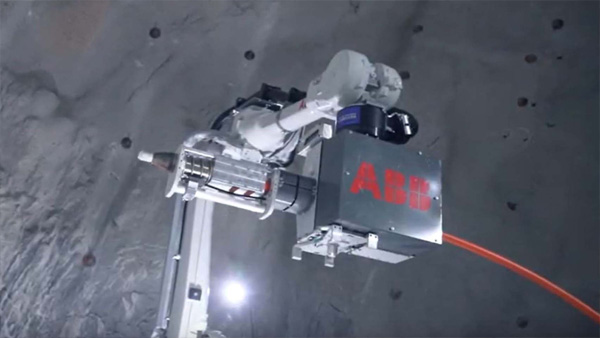
El robot autónomo de carga remota de ABB detecta automáticamente los pozos y los llena de explosivos y detonadores sin la presencia de humanos, de modo que las minas serán más seguras y eficientes, automatizando uno de los pocos procesos manuales que quedan en la minería: la carga de los pozos de voladura con explosivos.
ABB declaró: "En noviembre de 2019, los expertos en minería, robótica, automatización y software hicieron algo fuera de lo común. Viajaron a 1 km bajo tierra en la mina de Boliden Garpenbeg para demostrar una solución autónoma de robótica minera construida por ABB en colaboración con socios como Universes. Forma parte del proyecto Sistemas Inteligentes de Minería Sostenible (SIMS) que aspira a crear un impacto duradero en la forma en que probamos y demostramos nuevas tecnologías y soluciones para la industria minera".
Jan Nyqvist, Director de Producto de ABB para la Automatización de Minas dijo que la nueva tecnología que ha estado en desarrollo durante los últimos siete años y esta fue la primera prueba de la operación en el sitio. "Este proyecto comenzó como un pre-estudio hace siete años. El objetivo de ese pre-estudio era aumentar la seguridad. ¿Qué podemos hacer para mejorar la seguridad en los diferentes ambientes de trabajo? ¿Cómo podemos trasladar a la gente de las zonas inseguras? Ese fue el punto de partida. La forma en que funcionó, hicimos un estudio de campo, fuimos a una de las minas para ver cómo lo hacen hoy en día. Basándonos en el estudio de campo pudimos hacer una descripción del problema, desglosar todo para ver cómo automatizar esto. Basándonos en eso desarrollamos un diseño conceptual, y el diseño conceptual nos dio la respuesta, "¿podemos hacer esto? La respuesta fue sí".
ABB construyó un prototipo a escala real en el laboratorio para probar realmente el ciclo totalmente automatizado y finalmente en Boliden Garpenberg fue posible ver la prueba de concepto en funcionamiento. Roger Agren, director de proyectos de ABB: "El robot necesita encontrar los agujeros perforados en la cara. Lo hace con el sistema de visión e identifica todos los agujeros perforados dentro del área de escaneo. El sistema finalmente calcula cuántos de ellos son posibles de alcanzar y cargar. El siguiente paso es comenzar la operación de carga del primer agujero obteniendo un cassette de detonador del almacén de detonadores. El detonador se une a la cartilla, se da la vuelta y se fija al extremo de la manguera de carga. La cabeza de carga se mueve entonces a la posición del primer agujero y la manguera de carga se empuja dentro del fondo del agujero perforado. Los explosivos son bombeados a través de la manguera mientras está retraída. Después de eso, básicamente tenemos que empezar el mismo procedimiento de nuevo."
Caroline Kuiper, Gerente de Minería de Boliden Garpenberg dijo: "Estamos muy contentos de escuchar sobre el proyecto SIMS para probar este cargador de robótica ABB. Con este cargador robótico podemos hacer que el entorno ya seguro que tenemos sea aún más seguro. Esperamos ver a dónde nos llevará esto. Es muy bueno tener asociaciones con socios fuertes en el mercado incluso para probar nuevas tecnologías. Nos da la posibilidad de dar nuestra aportación al desarrollador y tener soluciones a medida para cumplir con los propósitos de ajuste. Y al tener un entorno de trabajo más seguro, también nos convertimos en un empleador más atractivo para las personas que quieren venir a trabajar aquí. Si piensas en una mina, piensas en esta industria pesada y sucia y peligrosa y ya no es así. Proyectos como este harán que esto se vuelva aún más atractivo. Esperamos conseguir una mayor diversidad de personas que buscan trabajo en las minas".
Fuente: tecnolgia minera